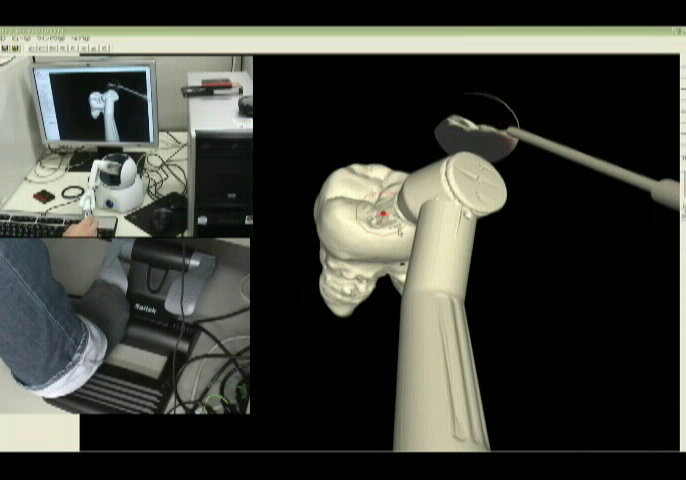
医科歯科シミュレータ・ナビゲータを開発しています(製作中です。完成はしばらく先です)
三感(視覚、聴覚、触覚)で仮想世界をリアルに感じたり、現実世界と重畳させたり、
現実にはない情報を生み出して医師を支援したりしています。
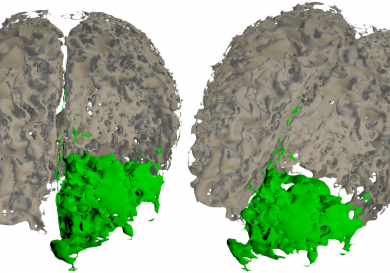
脳神経外科学
関西医科大学 医学部医学科 脳神経外科学教室、渡辺先生や南角先生(総合情報学部情報学科)と一緒に、脳神経外科手術ナビゲーションシステムの開発を目指しています。
このテーマは、今年度から始めたので、現在はブレインシフト(手術の進行にあわせて,髄液が排出し,脳は偏位していく現象のこと)を計測し、それに基づいて癌組織やその他の脳組織のSTLモデルの変形を制御しています。すなわち、センサ情報に基づいてブレインシフトシミュレータを製作しています。まだまだ、ソフトウエアもハードウエアも試作を始めたばかりで、試行錯誤の連続です。
他のテーマとの大きな違いは、脳は頭蓋骨で覆われているので、位置や姿勢が変わらないこと、および脳は細かな神経や血管が入り組んでいるので、マイクロサージェリーといった超細密な手術になることが多いなどが挙げられます。
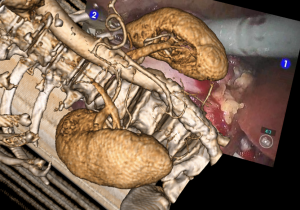
泌尿器科学
大西先生が研究代表で、小枝先生や私(総合情報学部情報学科)、および京都大学 医学部医学科 泌尿器科学教室が協力して、腎臓外科手術ナビゲータ・シミュレータを開発しています。
2012年(日本で最初)に、前立腺がんが対象のダビンチロボット手術が保険適用になったことから(2016年現在、胃がんや腎がんも保険適用になりつつある)、泌尿器科学分野ではダビンチロボット手術や腹腔鏡手術が一般的です。
腹腔鏡手術、それをさらに進化(視野が上下逆にならない。メスやハサミの操作がより直感的など。)させたダビンチロボット手術では、カメラ等の計測器を体内に入れるのが困難なので、内臓の位置姿勢の変化、および形状の変化をセンサでとらえるのが開腹手術に比べて格段に難しくなります。
そこで、主として画像処理を工夫した手術システムの開発をしています。しかし、腎臓は、胃や腸はもちろん肝臓に比べても固いので、形状の変化を考慮しなくても良いところは取り扱いで容易です。
最後に、ダビンチロボット手術(腹腔鏡手術)は、体に優しく患者の回復が早い手術なので、将来性の豊かな新規テーマとして取り組んでいます。