研究紹介
ここでは、現在進行中の研究プロジェクトを紹介します。2009年以降に開始した医科歯科シミュレータ・ナビゲータの研究です。

肝臓外科学
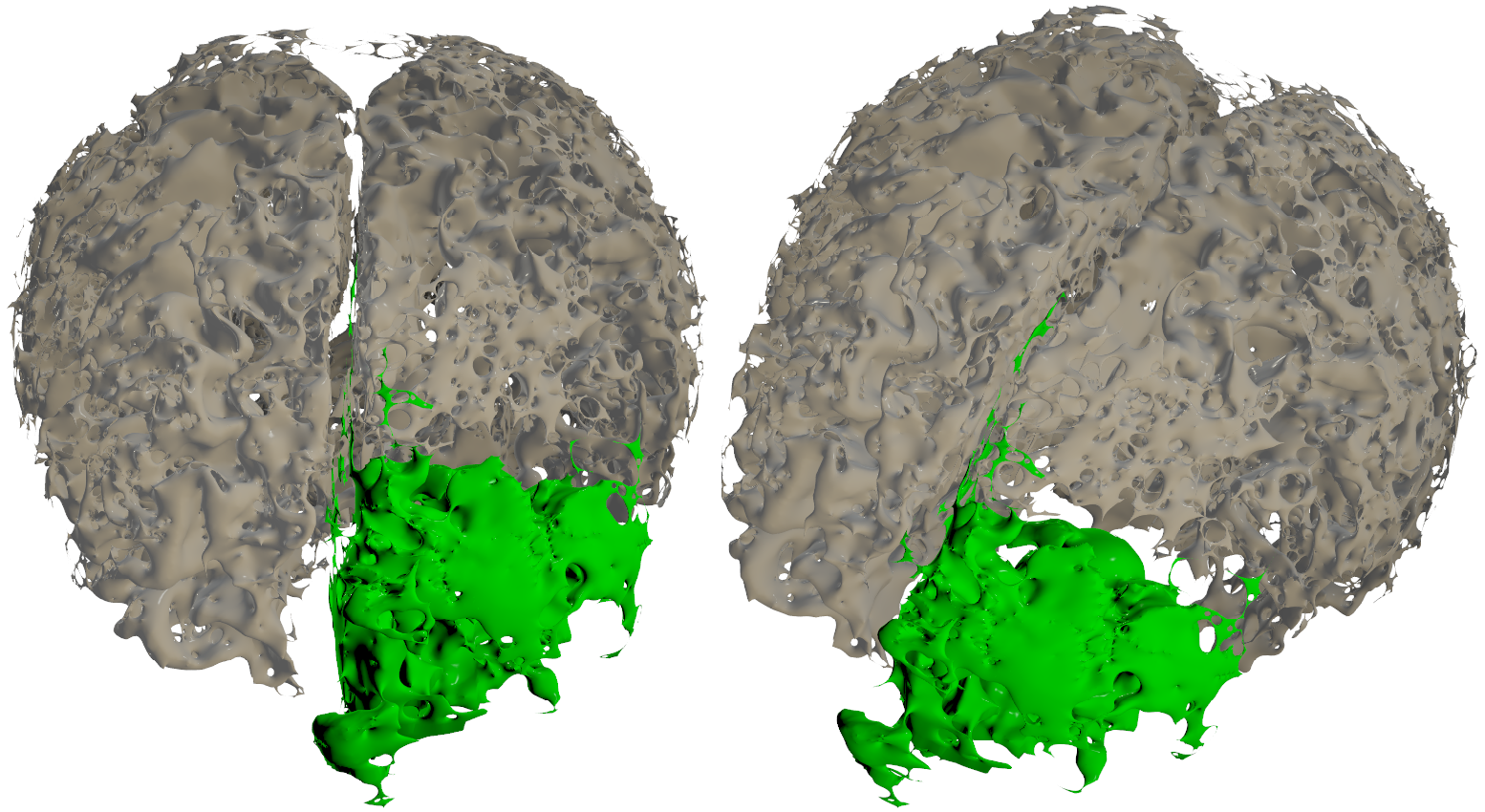
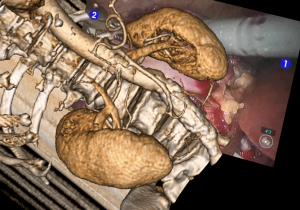
関西医科大学 医学部医学科 外科学教室と肝臓外科シミュレータとナビゲータの共同研究をしています。特に、開腹手術に対応したシステムやソフトウエアを開発しています。初期位置姿勢合わせ、動きの追従、変形の追従など、実世界と仮想世界の重畳表示が最初の課題です。仮想肝臓が実肝臓に重畳されれば、仮想肝臓の内部にある3脈管や癌細胞の位置姿勢を利用した医師支援システムより、実肝臓を適切に切開していきます。
【主な研究費】科研費 基盤研究(B)(2014-2016) 課題番号:26289069 GPUの深度画像並列処理機能による肝臓手術ナビゲーションシステムの製作とその評価
大阪電気通信大学大学院 共同研究費(A) (2014-2017)相手側対応研究グループ:関西医科大学(權 雅憲・外科学教室・主任教授) GPGPUを利用したリアルタイム肝臓手術シミュレータ・ナビゲータの構築
歯科理工学
大阪大学歯学部歯学科歯科理工学教室 と共同で、歯科施術シミュレータの研究をしています。マイクロオーダの歯切削、およびその際の触覚をハプティクス(触覚フィードバックデバイス)でリアルに体感するアルゴリズムやモデルングが研究開発の中心です。
【主な研究費】科研費 基盤研究(B))(2012-2014) 課題番号:22360109
汎用のGPGPUやハプティクスを利用した先端歯科オペレーションシステムの構築
Construction of Advanced Dental Operation System using Commercial-Based GPGPU and Haptics
これまでの研究紹介
ここでは、2008年以前の研究を紹介します。
いろいろな研究を多くの院生や学部生、および学内外の人々と一緒にやってきました。どれも現在の医用工学の研究や製品開発に繋がっています。また、これから開発する予定の肝臓・腎臓・脳の外科手術ナビゲーションシステムにも、これまで培ってきた“移動ロボットやロボット・マニピュレータのナビゲーション技術”、および“センシング技術や計測と制御の技術”を活用していきます。
1985-1987 【階層モデルと干渉チェック】オクトツリー(位置に関する階層モデル)を利用した高速干渉チェック法《GPUのz-bufferingを利用した医用メスと内臓との高速干渉チェックアルゴリズムへと受け継がれています》
1988-1990 【モデルに基づくロボットの経路・動作計画】ロボットと障害物の最近接2点の決定法、およびそれを活用したマニピュレータの動作計画、移動ロボットの経路・動作計画法《医師への最適手術系列提示するところに受け継がれています》
1991-1994 【センサ情報に基づくロボットの経路・動作計画】センサベーストナビゲーションアルゴリズム、特に移動ロボットの位置推定にGPSやオドメトリを用いた場合の目的地への到達理論《モデルベース(DICOMデータ)からセンサベース(深度画像やマーカビジョンデータ)へとシフトしていくところに受け継がれています》
1995-1996 【実験に基づくロボットの経路・動作計画】移動ロボットやロボット・マニピュレータを用いたセンサベーストナビゲーションアルゴリズムの評価実験。《センサベース(深度画像やマーカビジョンデータ)によるモデルベース(DICOMデータ)の制御》[ミュンヘン工科大学で高機能移動ロボットを用いた実証実験を実施]
1997-2000 【遠隔地のロボット操作】テレオペレーションシステムやマスタ―スレーブロボットの製作と評価《将来、遠隔地の手術や診断などに引き継ごうと思っています》
2000-2003 【操作対象のモデリング】ロボット・マニピュレータに物体操作をさせる際の剛体衝突・レオロジー物体変形アルゴリズムやその評価実験《歯(エナメル質・象牙質・歯髄)および肝臓などの内臓などのモデリングに活かしています》
2004-2007 【視覚・触覚・音声の融合】エンタテイメント(ゲームやアニメーション)における剛体衝突、特に触覚フィードバックデバイス(ハプティクス)による触覚体感《歯(エナメル質・象牙質・歯髄)の切削視触覚、肝臓などの内臓を操作したり切開するときの切削視触覚に活かしています》
2009-2013 【歯科施術シミュレーションシステム】歯科施術シミュレーションシステムの設計、開発、および評価
2014- 【医科手術シミュレーション・ナビゲーションシステム】医科シミュレーション・ナビゲーションシステムの設計、開発、および評価
オクトツリーを利用した高速干渉チェック法
2014年10月29日に「オクトツリーを用いた高速干渉チェック法」およびその関連論文が、日本ロボット学会「日本のロボット研究開発の歩み」選出されました。関連業績や動画もそちらにあります。私の博士論文(大阪大学)のほとんどがここに網羅されています。
- Y.H.Liu, Hiroshi Noborio, Suguru Arimoto, "A New Solid Model HSM and Its Application to Interference Detection Between Moving Objects," Journal of Robotics Systems, Vol.8, No.1, pp.39-54, Jan. 1991.
- 登尾 啓史, 渡辺 元彦, 藤井 剛,"マニピュレータの連続的な障害物回避動作を生成する実際的アルゴリズム", 計測自動制御学会論文集,Vol.26,No.12,pp.1435-1442, Dec. 1990.
- Hiroshi Noborio, Tomohide Naniwa, Suguru Arimoto,"A Quadtree-Based Path-Planning Algorithm for a Mobile Robot", Journal of Robotics Systems, Vol.7, No.4, pp.555-574, August 1990.
- 登尾 啓史, 浪花 智英, 有本 卓,"クワッドツリーを利用した移動ロボットの高速経路生成アルゴリズム",日本ロボット学会誌, Vol.7, No.5, pp.403-413, Oct. 1989.
- 登尾 啓史, 浪花 智英, 有本 卓,"クワッドツリーを利用した移動ロボットの高速動作生成アルゴリズム",日本ロボット学会誌,Vol.7, No.5 pp.414-425, Oct. 1989.
- 劉 雲輝, 登尾 啓史, 有本 卓,"移動物体間の干渉が効率的にチェックできるソリッドモデルHSMの提案",日本ロボット学会誌,Vol.7, No.5, pp.426-434, Oct. 1989.
- 登尾 啓史, 有本卓,"オクトツリーを利用したロボットと障害物の近接2点決定アルゴリズム",日本ロボット学会誌,Vol.7, No.3, pp.151-160, June 1989.
- Hiroshi Noborio, Shozo Fukuda, Suguru Arimoto,"Fast Interference Check Method Using Octree Representation", Journal of Advanced Robotics, Vol.3, No.3, pp.193-212, Sept. 1989.
- 登尾 啓史, 畑 祐志, 有本 卓,"オクトツリーを利用した3次元物体の最近点探索アルゴリズム",情報処理学会論文誌,Vol.30, No.3, pp.311-320, March 1989.
- Hiroshi Noborio, Shozo Fukuda, Suguru Arimoto,"Construction ofthe Octree Approximating Three-Dimensional Objects by Using Multiple Views", IEEE Trans. on Pattern Analysis and Machine Intelligence, Vol.PAMI-10, No.6, pp.769-782, Nov. 1988.
- 登尾啓史, 福田尚三, 有本卓,"複数枚の画像を用いて3次元物体を近似したオクトツリーを生成する一手法",情報処理学会論文誌,Vol.29, No.2, pp.178-189, Feb. 1988.
- 登尾啓史, 福田尚三, 有本卓,"BRepからオクトツリーへの変換アルゴリズムとその評価",情報処理学会論文誌,Vol.28, No.10, pp.1003-1012, October 1987.
- 登尾啓史, 福田尚三, 有本卓,"オクトツリーを用いた高速干渉チェック法",日本ロボット学会誌,Vol.5, No.3, pp.189-198, June 1987.
クワッドツリーを用いた高速経路動作計画
ここでは、移動ロボットが走行する環境の天井にカメラを取り付け、その画像をクワッドツリー(2次元空間の位置に関する階層モデル)に高速変換し、クワッドツリーのもとで移動ロボットの現在地から目的地までに準最短経路(画素のデジタル誤差が存在するので)を高速に選択したり、特に狭いところでは移動ロボットの回転自由度を用いて、回避動作で障害物を回避させたりするモデルベーストナビゲーションのアルゴリズムを提案した。
【関連論文】
- Hiroshi Noborio, Tomohide Naniwa, Suguru Arimoto,"A Quadtree-Based Path-Planning Algorithm for a Mobile Robot", Journal of Robotics Systems, Vol.7, No.4, pp.555-574, August 1990.
- 登尾 啓史, 浪花 智英, 有本 卓,"クワッドツリーを利用した移動ロボットの高速経路生成アルゴリズム",日本ロボット学会誌, Vol.7, No.5, pp.403-413, Oct. 1989.
- 登尾 啓史, 浪花 智英, 有本 卓,"クワッドツリーを利用した移動ロボットの高速動作生成アルゴリズム",日本ロボット学会誌,Vol.7, No.5 pp.414-425, Oct. 1989.
- Hiroshi Noborio, Tomohide Naniwa, Suguru Arimoto,"A Feasible Motion Planning Algorithm Using the Quadtree Representation", Proceedings of the 1988 IEEE Int. Work. Intel. Robot and Systems (IROS'88), pp.769-774, Oct. 1988.
- Hiroshi Noborio, Tomohide Naniwa, Suguru Arimoto,"A Feasible Motion-Planning Algorithm for a Mobile Robot on a Quadtree Representation", In Proceedings of the 1989 IEEE Int. Conf. Robotics and Automation (ICRA'89), pp.327-332, May 1989.
センサベーストナビゲーション
この研究では、移動ロボットは上部に搭載したビジョンセンサ、および周囲に多数搭載したダンパ触覚、赤外線センサ、および超音波センサを頼りに、その周囲の静止障害物や移動物体(人間や他のロボットなど)を検知している。
このセンサ情報のみを頼りに、たとえ環境情報(地図)が予め全く解っていなくても、移動ロボットは目的地の周囲に確実に到達させるのが、センサベーストナビゲーションである。これは、環境情報は完全に解っているものとして、移動ロボットを最適(最短)経路で目的地に導くモデルベーストナビゲーションとまさに対極をなす。
このセンサベーストアルゴリズムは、誤差対策的にも有望である。すなわち、オペレータが大まかな位置指令を与えるのみで、移動ロボットは自律的に目的地の付近に到達してくれる。我々は、移動ロボットの位置誤差、姿勢誤差、および各種センサの計測誤差がアルゴリズムにどのような影響を与えるかを理論的に調べ、その通りになるかロボットで実験して確かめた。
【関連業績(アルゴルズム解析理論系)】
- Hiroshi Noborio, Ryo Nogami and Satoru Hirao, "A New Sensor-Based Path-Planning Algorithm whose Path Length is Shorter on the Average," In Proceedings of IEEE Int. Conf. on Robotics and Automation, pp.2832-2839, 2004.
- 吉岡 孝, 登尾 啓史, 富永 昌治, "移動ロボットのセンサベーストナビゲーションについて," 日本ロボット学会誌, Vol.19, No.8, pp.991-1002, 2001.
- 吉岡 孝,登尾 啓史,"障害物の幾何学的性質にもとづくセンサベーストデッドロックフリーナビゲーションアルゴリズム," 計測自動制御学会論文集, Vol.33, No.4, pp.280-288, 1997.
- Hiroshi Noborio, "On a Sensor-Based Navigation for a Mobile Robot", Journal of Robotics and Mechatronics, Vol.8, No.1, pp.2-14, March 1996.
- 登尾 啓史, "センサベーストパスプランニングをデッドロックフリーにする十分条件の領域的一般化について,"情報処理学会論文誌, Vol.36, No.12, pp.2782-2792, December 1995.
- 登尾 啓史, "センサベーストパスプランニングをデッドロックフリーにする十分条件の関数的一般化について,"計測自動制御学会論文集, Vol.31, No.10, pp.1769-1777, October 1995.
- Hiroshi Noborio,"A Sufficient Condition for Designing a Family of Sensor-Based Deadlock-Free Path-Planning Algorithms," Journal of Advanced Robotics, Vol.7, No.5, pp.413-433, January 1993.
- Hiroshi Noborio,"Several Path Planning Algorithms of a Mobile Robot for an Uncertain Workspace and their Evaluation", In Proceedings of the IEEE Int.Work. Intel.Motion Control,Vol.1, pp.289-294, August 1990.
- 登尾 啓史, 吉岡 孝, グンター シュミット, "障害物が疎らな未知環境で位置・姿勢・センサ誤差を克服するセンサベーストナビゲーション," 計測自動制御学会論文集, Vol.37, No.4, pp.346-354, 2001.
- H.Noborio and T.Yoshioka, "On the Sensor-Based Navigation Under Position and Orientation Errors", Journal of Automatisierungstecknik, Vol.48, No.6, pp.281-288, 2000.
- 登尾 啓史, 吉岡 孝, " センサベーストナビゲーションにおいて移動ロボットが目的地付近まで到達できる誤差の条件," 計測自動制御学会論文集, Vol.34, No.7, pp.814-822, 1998.
- 吉岡 孝, 登尾 啓史, 富永 昌治, " 障害物が密集する未知環境で位置や姿勢の誤差を克服するセンサベーストナビゲーション," 計測自動制御学会論文集, Vol.34, No.2, pp.157-165, 1998.
- Hiroshi Noborio, Motohiko Watanabe, and Takeshi Fujii, "An Efficient Path-Planning Algorithm for a Robotic Manipulator by Automatic Selection Search of Indispensable Regions in Its Configuration Space," Journal of Robotics and Mechatronics, Vol.4, No.5, pp.378-385, October 1992.
- 登尾 啓史, "未知空間におけるパスプランニングアルゴリズムを設計するための十分条件とそれにもとづくアルゴリズムの評価 -ゴールからのユークリッド距離に基づく経路計-," 情報処理学会論文誌,Vol.33, No.8, pp.1013-1021, August 1992.
- 登尾 啓史, 橋目 譲, "可視領域を持つ移動ロボットの未知空間における実際的なパスプランニングアルゴリズム," 日本ロボット学会誌,Vol.10, No.3, pp.378-384, June 1992.
- 笹川科学研究助成(年度:1990, 研究区分:一般, 助成者名: 登尾 啓史, 所属機関:大阪電気通信大学工学部精密工学科, 研究課題: 動的に変化する未知の作業空間において障害物回避経路を計画する一方法, 審査区分:数物・工学, 国籍: 所属機関:日本, 職名: 助教授, 研究所在地:大阪府, 研究番号: 3-037)
- 立石財団研究助成(研究助成(A,B), 番号:1, 年度:1991, 分類:研究, 氏名: 登尾 啓史, 所属機関名・職名: 大阪電気通信大学 総合情報学部情報工学科・教授, 研究課題名: 作業空間の形状情報を高速に獲得するロボットビションシステムの検討)
- 奨励研究(A) 1995 課題番号:07750299
非接触型オンラインパスプランニングにおけるデッドロックフリー特性の検討 - 奨励研究(A) 1994 課題番号:06750266
自己位置認識誤差がセンサベーストパスプランニングの収束性に与える影響について
マルチロボットナビゲーション
この研究では、移動ロボットは上部に搭載したビジョンセンサ、および周囲に多数搭載した版パ触覚、赤外線センサ、および超音波センサを頼りに、その周囲の静止障害物や移動物体(人間や他のロボットなど)を検知している。このセンサ計測情報のみを頼りに、ある移動ロボットは別の移動ロボットや人間を自動的に回避して目的地のさせるのが、マルチロボットのナビゲーションアルゴリズムである。このアルゴリズムを利用すると、オペレータは各々のロボットに目的地のみを与えるだけで、ここのロボットは自律的に他のロボットや人間を回避してそこに到達する。
【論文】
Takashi Yoshioka, Hiroshi Noborio, "Sensor-Based Traffic Rules for Multiple Automata Based on a Geometric Deadlock-Free Characteristic," Journal of Robotics and Mechatronics, Vol.8, No.1, pp.48-56, March 1996.
Y.H.Liu, S.Kuroda, T.Naniwa, H.Noborio, S.Arimoto,"A Practical Algorithm for Planning Collision-Free Coordinated Motion of Multiple Mobile Robots", In Proceedings of the 1989 IEEE Int. Conf. Robotics and Automation (ICRA'89), pp.1427-1432, May 1989.
【主たる研究費】
複数の移動ロボットと人間が共存できるオンラインナビゲーションの研究
On the On-Line Navigation when Multiple Mobile Robots and Human Beings Move Simultaneously in the Same 2-D Uncertain Environment
相互通信可能な複数移動ロボットの幾何学的性質による協調パスプランニング
センサベーストアセンブリ
ロボット・マニピュレータの手先効果器に装着されている6軸力覚センサの信号を介して、目的地のみを与えた後はその触覚だけを頼りにそこに自動的に手先を誘導している。すなわち、ロボットを制御するコンピュータは障害物の位置・姿勢やその形状を全く知らなくてよい。このアルゴリズムを利用することにより、オペレータが大まかな位置指令を与えるのみで、ロボット・マニピュレータが自律的にタスクを達成してくれる。
【論文】
- Hiroshi Noborio, Misao Kadowaki, and Kenji Urakawa, "A Near-Optimal Sensor-Based Motion-Planning Algorithm for Parts Mating," In Proceedings of the 1998 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS '98), pp.1001-1008, October 13-17, Victoria, 1998.
- Hiroshi Noborio, Takahiko Hamaguchi, and Tadashi Yamamoto, "Experiments with a 3DD Robotic Manipulator Operating by a Sensor-Based Assembly," In Proceedings of the IEEE International Symposium on Assembly and Task Planning, Marina del Rey, California, pp.249-256, August 7-9, 1997.
ウエアラブルによる仮想空間の散歩およびナビゲーションアルゴリズムの評価
ここでは、人がHMDを装着したり、動き回る人の位置を複数台の全方位ビジョンの方向を融合することで取得し、自由な仮想世界(例えば、博物館のデジタルコンテンツを用意して)を散歩できるようにしたものである。
さらに、このウエアラブルシステムを利用して、各種のナビゲーションアルゴリズムを搭載した複数のロボットが動き回る空間を設定し、そこを人が散歩してみてどのアルゴリズムによる移動ロボットの回避が人間から見てストレスにならないかを主観的に評価した。
【論文】
- Ritsu Shikata, Takayuki Goto, Hiroshi Noborio and Hiroshi Ishiguro, "Wearable-Based Evaluation of Human-Robot Interactions in Robot Path-Planning, " In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA'03), pp.1946-1953, Taipei, September 15-18, 2003.
テレロボティックスにおける群ロボットのナビゲーションの自律性について
On the Navigation Autonomy of Multiple Mobile Robots in Tele-Robotics
マスタ―スレーブロボットシステムの製作
先行研究である、ロボット・マニピュレータのセンサベーストアセンブリのアルゴリズムを用いると、オペレータは大まかな位置指令を与えるのみで、ロボット・マニピュレータが自律的にタスクを達成してくれる。この位置列を与えるのが、マスタースレーブロボットシステムであり、人間が自分の目で見ながら直接ロボットを操作する。
【論文】
- Naoto Funabiki, Kazuhiro Morishige, and Hiroshi Noborio, "Sensor-Based Motion-Planning of a Manipulator to Overcome Large Transmission Delays in Teleoperation," In Proceedings of the IEEE International Conference on System Mans and Cybernetics, pp.1119-1122, Tokyo, October 17-21, Vol.5, 1999.
コンフィギュレーション空間スライシング
【論文】
- Hiroshi Noborio and Kazuhiro Morishige: "A Comparative Study of Cartesian and Configuration Space for Manipulating a 3-D Task, " In Proceedings of the IEEE International Workshop on Robot-Human Interactive Communication (ROMAN'01), pp.326-332, Bordeaux and Paris, September 18-21, 2001.
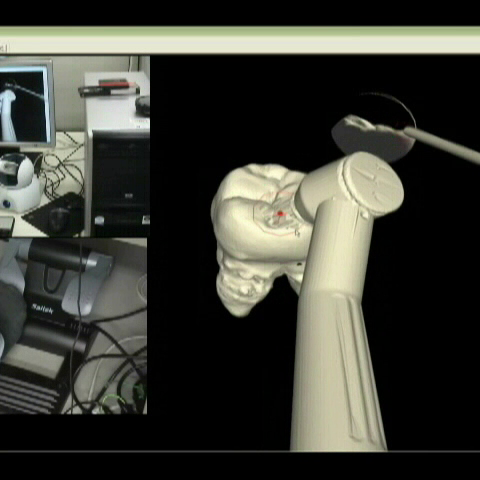
テレオペレーションロボットシステムの構築
ここでは、先行研究である、マスタ―スレーブロボット、ロボット・マニピュレータのセンサベーストアセンブリ、そしてコンフィギュレーション空間スライシングの技術を融合し、オペレータが快適に遠隔地から(時間遅れを発生させる)位置系列を送るだけで、ロボット・マニピュレータが自律的にタスクを達成するテレオペレーションシステムを提案した。
【論文】
- Hiroshi Noborio and Kazuhiro Morishige: "A Comparative Study of Cartesian and Configuration Space for Manipulating a 3-D Task, " In Proceedings of the IEEE International Workshop on Robot-Human Interactive Communication (ROMAN'01), pp.326-332, Bordeaux and Paris, September 18-21, 2001.
- Kazuhiro Morishige and Hiroshi Noborio, "A Tele-operation Support System with the Help of Dual Views of Cartesian and Configuration Space," In Proceedings of the IEEE International Workshop on Robot and Human Communication (ROMAN '00), pp.383-387, Osaka, Sept.27-29, 2000.
- Takashi Makiishi and Hiroshi Noborio, "Sensor-Based Path-Planning of Multiple Mobile Robots to Overcome Large Transmission Delays in Teleoperation," In Proceedings of the IEEE International Conference on System Mans and Cybernetics, pp.656-661, Tokyo, October 17-21, Vol.4, 1999.
テレロボティックスにおける群ロボットのナビゲーションの自律性について
On the Navigation Autonomy of Multiple Mobile Robots in Tele-Robotics
レオロジー物体のモデリング
- Takeshi Ikawa and Hiroshi Noborio, "On the Precision and Efficiency of Hierarchical Rheology MSD Model," In Proceedings of IEEE/RSJ International Conference on Intelligent Robots and Systems, pp.376-383, 2007.
- Haruyuki Yoshida, Fumiaki Ujibe, Hiroshi Noborio, "Force/Shape Reappearance of MSD Rheology Model Calibrated by Force/Shape Sequence," In Proceedings of 17th Int. Conf. on Artificial Reality and
Telexistence, pp.121-128, 2007. - Haruyuki Yoshida, Masaya Morino, Norihisa Ogawa, Hiroshi Noborio, "A Force/Displacement Transformation Method for Digitalized Virtual Deformable Object," In Proceedings of 9th Int. Conf. Control, Automation, Robotics and Vision, Singapore, pp.1097-1102, 2006.
- Haruyuki Yoshida, Yasuyuki Murata and Hiroshi Noborio, "A Smart Rheologic MSD Model Pushed/Calibrated/Evaluated by Experimental Impulses," In Proceedings of IEEE/RSJ International Conference on Intelligent Robots and Systems, pp.1614-1621, 2005.
- Ryo Nogami, Fumiaki Ujibe, Hiroki Fujii and Hiroshi Noborio, "Precise Deformation of Rheologic Object under MSD Models with Many Voxels and Calibrating Parameters," In Proceedings of IEEE Int. Conf. on Robotics and Automation, pp.1919-1926, 2004.
- Ryo Nogami, Hiroshi Noborio, Seiji Tomokuni and Shinichi Hirai, "A Comparative Study of Rheology MSD Models whose Structures are Lattice and Truss," In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, pp.3809-3816, 2004.
- Hiroshi Noborio, Ryo Enoki, Shohei Nishimoto and Takumi Tanemura, "On the Calibration of Deformation Model of Rheology Object by a Modified Randomized Algorithm, " In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA'03), pp.3729-3736, Taipei, September 15-18, 2003.
- Hiroshi Noborio, Ryo Nogami, Ryo Enoki, "Precise Deformation of Rheology MSD Model Calibrated by Randomized Algorithm," Eurographics 2003, Short Presentations, Granada Spain, pp.171-178, 2003.
- 科研費 基盤研究(B) 課題番号:18360128 (2006-2008) 複合現実感による手術シミュレーションに関する基礎研究
Fundamental research of medical surgical simulation with the help of virtual reality - 科研費 基盤研究(C) 課題番号:14550247 (2002-2004)視覚・触覚・聴覚を仮想提示する際の衝突・接触・変形現象のモデリングに関する研究Modeling and Calibration of Contact, Friction and Deformation between a Rigid Object and another Rigid or Rheology Object
- 大阪電気通信大学共同研究(A) (2003-2005)相手側対応研究グループ:立命館大学(平井慎一・大学院理工学研究科・機械システム系・ロボティックス学科・教授) 並列アルゴリズムやVLSIによる物理シミュレーションの高速化とその仮想現実感への応用に関する研究
撃力衝突モデルに基づくビリヤードの精度向上
- 科研費 基盤研究(B) 課題番号:18360128 (2006-2008) 複合現実感による手術シミュレーションに関する基礎研究
Fundamental research of medical surgical simulation with the help of virtual reality - 科研費 基盤研究(C) 課題番号:14550247 (2002-2004)視覚・触覚・聴覚を仮想提示する際の衝突・接触・変形現象のモデリングに関する研究Modeling and Calibration of Contact, Friction and Deformation between a Rigid Object and another Rigid or Rheology Object
- 大阪電気通信大学共同研究(A) (2003-2005)相手側対応研究グループ:立命館大学(平井慎一・大学院理工学研究科・機械システム系・ロボティックス学科・教授) 並列アルゴリズムやVLSIによる物理シミュレーションの高速化とその仮想現実感への応用に関する研究
撃力衝突モデルに基づくエアホッケーの触覚精度の向上
- Toshiko Iguchi, Tetsuya Kodama and Hiroshi Noborio, "A Precise Approach Calibrated by Experimental Data to Make an Artificial Impulse," Eurographics 2003, Short Presentations, Granada Spain, pp.241-248, 2003.
- Toshiko Iguchi, Noriyuki Katsuyama, Hiroshi Noborio and Shinichi Hirai, "Computing and Calibrating Collision Impulses and its Application for Air Hockey Game ," In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS'02), September 30 - October 4, EPFL Lausanne, Switzerland, pp.2219-2226, 2002.
- 科研費 基盤研究(B) 課題番号:18360128 (2006-2008) 複合現実感による手術シミュレーションに関する基礎研究
Fundamental research of medical surgical simulation with the help of virtual reality - 科研費 基盤研究(C) 課題番号:14550247 (2002-2004)視覚・触覚・聴覚を仮想提示する際の衝突・接触・変形現象のモデリングに関する研究Modeling and Calibration of Contact, Friction and Deformation between a Rigid Object and another Rigid or Rheology Object
- 大阪電気通信大学共同研究(A) (2003-2005)相手側対応研究グループ:立命館大学(平井慎一・大学院理工学研究科・機械システム系・ロボティックス学科・教授) 並列アルゴリズムやVLSIによる物理シミュレーションの高速化とその仮想現実感への応用に関する研究
撃力に基づく剛体衝突モデルの組み立て作業への適用
Fundamental research of medical surgical simulation with the help of virtual reality